 The Kermac No. 16 (blogmercante.com)
The Kermac No. 16 (blogmercante.com)
1940's - The Mighty Kermac No. 16 (1947)
In 1947 Dean McGee of Kerr-McGee Oil Industries Inc. set out to construct the first “out of sight” offshore drilling rig. After partnering with Philips Petroleum and Stanolind Oil & Gas, Brown & Root was hired to design and engineer a freestanding platform 10 miles off the coast of the Gulf of Mexico. The drilling site, which was 43 miles off of Morgan City, La reached a depth of 18ft. Sixteen 24 inch pilings were pummeled 104 feet into the sea floor to secure the 2,700 square foot wooden deck. Ocean liners were required to provide quarters for the crew, equipment and supplies, etc. The Kermac No. 16 produced 40 bbl/hr. (1)
In 1947 Dean McGee of Kerr-McGee Oil Industries Inc. set out to construct the first “out of sight” offshore drilling rig. After partnering with Philips Petroleum and Stanolind Oil & Gas, Brown & Root was hired to design and engineer a freestanding platform 10 miles off the coast of the Gulf of Mexico. The drilling site, which was 43 miles off of Morgan City, La reached a depth of 18ft. Sixteen 24 inch pilings were pummeled 104 feet into the sea floor to secure the 2,700 square foot wooden deck. Ocean liners were required to provide quarters for the crew, equipment and supplies, etc. The Kermac No. 16 produced 40 bbl/hr. (1)
 The first MODU: Mr. Charlie (rigmuseum.com)
The first MODU: Mr. Charlie (rigmuseum.com)
Mr. Charlie - The first submersible (1954):
In 1954, Alden J. LaBorde designed a submersible rig capable of drilling in water depths up to 40 feet deep. A drilling barge equipped with pontoons on both sides, each one acting as a counterweight to the other. This particular design provided better stability. One is pontoon is slowly flooded until the other side has reached the ocean floor; the process is repeated for the remaining pontoon. LaBorde also designed and built the first barge whose sole purpose was drilling. This abolished the need to modify naval ships to haul supplies and crew. (2)
In 1954, Alden J. LaBorde designed a submersible rig capable of drilling in water depths up to 40 feet deep. A drilling barge equipped with pontoons on both sides, each one acting as a counterweight to the other. This particular design provided better stability. One is pontoon is slowly flooded until the other side has reached the ocean floor; the process is repeated for the remaining pontoon. LaBorde also designed and built the first barge whose sole purpose was drilling. This abolished the need to modify naval ships to haul supplies and crew. (2)
 The Cuss 1 (misunderstoonmariner.com)
The Cuss 1 (misunderstoonmariner.com)
1950's - Dynamic Positioning (1956)
In 1956, The Cuss 1 was the first drillship to adopt the newly developed technology, Dynamic Positioning. Dynamic Positioning (DP) is a system that keeps a vessel in a single position at a constant heading using only its own propellers and thrusters (3). In 1957, The Cuss 1 drilled in 400 feet of water. Along with breaking deep water drilling records the drillship was also used in scientific expeditions to extract core samples from the earth’s crust (3).
In 1956, The Cuss 1 was the first drillship to adopt the newly developed technology, Dynamic Positioning. Dynamic Positioning (DP) is a system that keeps a vessel in a single position at a constant heading using only its own propellers and thrusters (3). In 1957, The Cuss 1 drilled in 400 feet of water. Along with breaking deep water drilling records the drillship was also used in scientific expeditions to extract core samples from the earth’s crust (3).
 The Bluewater Rig No. 1 (fineartamerica.com)
The Bluewater Rig No. 1 (fineartamerica.com)
1960's - The Bluewater Rig No. 1 (1961)
In 1961, Bruce Collipp, of Shell Oil Company, designed the first semisubmersible drilling rig, The Bluewater Rig No. 1. The idea for the design came to him on board of an ODECO submersible. While under tow during rough seas, the operator partially submerged the vessel to prevent it from capsizing. Collipp noticed the immediate improvement in stability and went on to design and patent his idea. The slim profile of the bottles and ballasts at the waters surface reduced the effect of wave action and gave Bluewater 1 the stability that hulled vessels could not achieve. (4)
In 1961, Bruce Collipp, of Shell Oil Company, designed the first semisubmersible drilling rig, The Bluewater Rig No. 1. The idea for the design came to him on board of an ODECO submersible. While under tow during rough seas, the operator partially submerged the vessel to prevent it from capsizing. Collipp noticed the immediate improvement in stability and went on to design and patent his idea. The slim profile of the bottles and ballasts at the waters surface reduced the effect of wave action and gave Bluewater 1 the stability that hulled vessels could not achieve. (4)
 Cognac Field (subseaIQ.com)
Cognac Field (subseaIQ.com)
1970's - Cognac Field (1975)
The first oil discovery in deep water occurred in 1975 at Shell Oil Company’s Cognac Field (10). The platform constructed by contractor McDermott, Inc. based his design on the steel fixed structures used in shallow water (5). The giant structure, which reached 1,265 feet in height, was taller than the Empire State Building and the deepest underwater well ever cultivated, operating at a depth of 1000 feet below the ocean surface.
The first oil discovery in deep water occurred in 1975 at Shell Oil Company’s Cognac Field (10). The platform constructed by contractor McDermott, Inc. based his design on the steel fixed structures used in shallow water (5). The giant structure, which reached 1,265 feet in height, was taller than the Empire State Building and the deepest underwater well ever cultivated, operating at a depth of 1000 feet below the ocean surface.
 Ultra Deep ROV (rov.org)
Ultra Deep ROV (rov.org)
1980's - Ultra Deep ROV (Remote Operated Vehicle)
The use of ROV’s for offshore operations began in the early 1980’s. HydroProducts designed two of the first ROVs developed for offshore work was the RCV-225 and the RCV-150. During the 80’s ROVs surpassed the ability of human divers. As a result of the many technological breakthroughs over the past three decades, ROV’s can work at depths up to 10,000 ft. ROV’s play various roles in the operations of the offshore oil and gas industry which include, performing inspections of subsea structures, connecting pipeline, placing underwater manifolds, initial construction of subsea structures, and repair and maintenance. (6)
The use of ROV’s for offshore operations began in the early 1980’s. HydroProducts designed two of the first ROVs developed for offshore work was the RCV-225 and the RCV-150. During the 80’s ROVs surpassed the ability of human divers. As a result of the many technological breakthroughs over the past three decades, ROV’s can work at depths up to 10,000 ft. ROV’s play various roles in the operations of the offshore oil and gas industry which include, performing inspections of subsea structures, connecting pipeline, placing underwater manifolds, initial construction of subsea structures, and repair and maintenance. (6)
 The Discoverer Enterprise (rigzone.com)
The Discoverer Enterprise (rigzone.com)
1990's - The Discoverer Enterprise (1997)
The development of new offshore technologies stalled in the early 90’s due in part to the crash of the world oil market in the mid 1980’s. Significant strides were made in the late 90’s when enhancements were made to the fourth generation semisubmersible which produced the fifth generation semisubmersibles. These behemoths, which have a long-ton displacement greater than fifty thousand, can operate in exceptionally jarring weather and in water as deep as 5,000 feet. The later model fifth generation semis are equipped with dynamic positioning systems. (7)
The development of new offshore technologies stalled in the early 90’s due in part to the crash of the world oil market in the mid 1980’s. Significant strides were made in the late 90’s when enhancements were made to the fourth generation semisubmersible which produced the fifth generation semisubmersibles. These behemoths, which have a long-ton displacement greater than fifty thousand, can operate in exceptionally jarring weather and in water as deep as 5,000 feet. The later model fifth generation semis are equipped with dynamic positioning systems. (7)
 KG2 (deepwater.com)
KG2 (deepwater.com)
2000's - Dhirubhai Deepwater KG2 (2010)
In early 2010, Transocean, Ltd. unveiled its newly constructed ultra-deepwater drillship, the Dhirubhai Deepwater KG2. KG2, which belongs to Transocean’s fleet of 24 ultra-deepwater floaters, is a sixth generation semisubmersible equipped with leading edge technology. The vessel has a deck load of 20,000 metric tons and can accommodate a crew of two hundred. KG2 is capable of working at water depths of 12,000 ft and can drill wells up to 35,000 feet deep. (8), (9)
In early 2010, Transocean, Ltd. unveiled its newly constructed ultra-deepwater drillship, the Dhirubhai Deepwater KG2. KG2, which belongs to Transocean’s fleet of 24 ultra-deepwater floaters, is a sixth generation semisubmersible equipped with leading edge technology. The vessel has a deck load of 20,000 metric tons and can accommodate a crew of two hundred. KG2 is capable of working at water depths of 12,000 ft and can drill wells up to 35,000 feet deep. (8), (9)
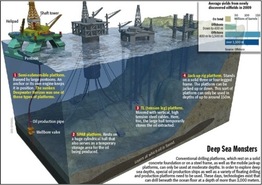 Big Sea Monsters (spiegel.de)
Big Sea Monsters (spiegel.de)
The Future Offshore...
In1975, the first deepwater reservoir was discovered. By the late 1990’s, total deepwater production had surpassed shallow water production. The unbelievable technological achievements, in a relatively short time span, are a testament to the fortitude and ingenuity the industry is known for and a strong indication of the direction it is headed. It is apparent the future of offshore drilling is a bright one. (10)
In1975, the first deepwater reservoir was discovered. By the late 1990’s, total deepwater production had surpassed shallow water production. The unbelievable technological achievements, in a relatively short time span, are a testament to the fortitude and ingenuity the industry is known for and a strong indication of the direction it is headed. It is apparent the future of offshore drilling is a bright one. (10)
